本文为原创,可在署名“周梦樊 高梦雪 严佳”和转自“昆明市水利学会”的前提下转载,否则视为侵权!
复杂结构水工隧洞带水服役水下检测关键技术探讨
1 导言
水利水电工程的水工隧洞由于长年运行,受自然老化影响,会出现混凝土破损、裂缝、老化、冲刷冲坑、金属腐蚀等问题,如何高效准确检测水工隧洞运行状况,是水电工程安全鉴定、水利水电工程日常管理维护中面临的重要课题。水电厂会定期对隧洞进行放空检查,以了解其运行情况,但放空检查一般耗时长、影响发电及运行,且对于高落差竖井、大斜井的水工隧洞,常规的人工检查和潜水员的水下作业都无法开展。
近年来,无人潜航器在我国水利水电工程中逐渐得到应用,如阿海水电站进水口检修闸门门槽水下探测、三峡水利枢纽导流底孔封堵检修门水下清理[1]~[6]等,这些工程应用案例均表明无人潜航器检查技术具有明显优势。以无人潜航器为载体搭载多类检测设备,对开放水域的水工建筑物部位进行检测,系统可实时、准确地反映缺陷的详细情况并确定其位置,胡明罡等[7]利用观察型无人潜航器(ROV)对密云水库白河泄空隧洞闸门井前有压段进行全方位水下探测,掌握了隧洞洞壁混凝土、裂缝和洞内淤积等状况,用DGPS定位了水下洞口位置和洞线走向,摸清了隧洞有压段在水下运行情况,为以后隧洞运行、维修和加固提供了决策依据,为高落差、大斜井、路径长、运行久及情况复杂未知的水下建筑物(特别是隧洞)的探测提供新的思路。将无人潜航器技术应用于水工隧洞日常定检,不仅可取代隧洞放空人工巡检,减少停机时间,降低检查成本,还可对竖井等常规人工检查手段无法到达的区域进行全覆盖检查,其技术优势显著。但无人潜航器在复杂结构水工隧洞封闭空间内进行水下作业过程中,面临着封闭空间水下定位精度、缺陷精细检测、无人潜航器运动实时监控等关键技术问题,本文主要探讨无人潜航器在水工隧洞进行水下检测的关键技术及解决途径。
2 无人潜航器系统简介
无人潜航器(Remotely Operated Vehicle,简称ROV),是能够在水下环境中长时间作业的高科技装备,尤其是潜水员无法承担的高强度水下作业、在潜水员不能到达的深度和危险条件下更显现出其明显的优势。ROV作为水下作业平台,由于采用了可重组的开放式框架结构、数字传输的计算机控制方式、电力或液压动力的驱动形式,在其驱动功率和有效荷载允许的情况,几乎可以覆盖全部水下作业任务,针对不同的水下使命任务,在ROV上配置不同的仪器设备、作业工具和取样设备,即可准确、高效地完成各种调查、水下干预、勘探、观测与取样等作业任务。无人潜航器系统主要包括了潜器单元、地面控制单元、脐带缆单元及吊放系统四部分。其中,潜器单元包括了高分辨率彩色摄像机(配套激光尺度仪)、水下定位系统、检测传感器系统、避碰声呐、内置姿态传感器、机械臂、推进器、照明灯等部件;地面控制单元包括了计算机控制单元、DV录像系统等部件。
无人潜航器系统的潜器单元是由水下摄像头、各种检测传感器等集成的运动平台。地面控制单元通过脐带缆将水面的动力和控制命令下传到潜器单元,将获取的视频及其他传感器数据上传到地面控制单元。地面控制单元控制潜器单元的运动、灯光、摄像头拍摄方向,调节搭载的传感器,显示并记录检测数据和水下影像,无人潜航器系统组成见图1。

图1 典型水下潜航器单元系统组成图
3 复杂结构水工隧洞水下检测关键技术
无人潜航器在水利水电工程中的应用可分为在开放水域(如消能设施、大坝坝前水域等)和封闭洞室水域(如引水隧洞、竖井、管道等)。无人潜航器在水利水电工程开放水域中水下定位有多种方式(GPS、超短基线、惯导等),现已经有较多成功的应用案例。而在封闭洞室水域中,水下潜航器原有的通信、水下定位方式、缺陷精细检测技术、安全作业控制等都遇到不同程度的技术难题,目前成功应用的案例并不多,且大多为断面较小、长度较短的水工隧洞。以下就针对封闭空间水下定位技术、缺陷精细检测技术、作业安全控制等关键技术问题探讨解决途径。
3.1 封闭空间水下定位技术
隧洞这类相对封闭的空间,声波受到狭窄空间多次反射的干扰,传统开阔水域的超短基线定位、长基线定位系统无法使用。为解决缺陷的定位精度问题,提出采用高精度的INS惯性导航系统,水下实时记录位置和速度的DVL多普勒计程仪,以及分别在控制端和ROV本体上加装导引声呐,联合水工模型的设计数据、避碰声呐、高度深度计及缆长计数器,可实时准确地归算ROV本体及探测到的缺陷位置。惯导系统是世界上唯一一种在管道环境中或者深水复杂环境中可以直接得到高精度位置信息的方法,其优势是不受复杂环境干扰,完全依靠自身活动三维参数计算位置,误差完全由运动产生,不会产生类似于超短基线定位系统声学反射产生的假位置,或者由声学噪音而产生错误位置信息。利用惯导系统可以实时确定机器人真实坐标。无人潜航器定位系统改造成品见图2。
表1 惯导设备主要定位指标(IXBLUE ROVINS产品)
| 技术参数 | 技术指标 |
| 最大工作深度 | 1000m |
| 艏向精度 | 0.05°(在多普勒计程DVL设备配合) |
| 横摇以及纵摇精度 | 0.01° |
| 定位导航精度(集成多普勒计程设备) | 2‰*里程 |
| 升沉精度 | 2.5cm或2.5% |
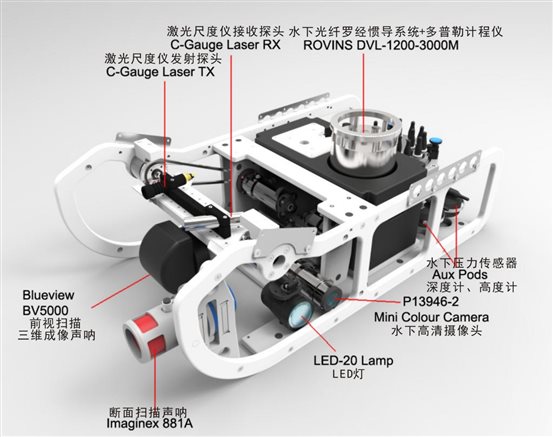
图2 水下航行器定位系统改造成品图
3.2 缺陷精细检测技术
为实现水工隧洞高效、准确检测的目的,采用“声学全覆盖普查、光学局部详查”的总体思路。在进行水工隧洞水下检查中,高精度的混凝土表观缺陷识别是检测技术实现的关键,因此在传统的多波束探头上通过提高频率、增加多通道声呐探头的方式,把普通多波束的400kHz提高到了2.25MHz,可实现物理上0.6cm的分辨率;引入三维多通道实时声呐技术,实现ROV在运动过程中对混凝土表观缺陷进行扫描。同时引入了高精度的高频二维图像声呐及可以高精度地识别裂缝宽度的激光尺度仪。激光尺度仪可以用于估测水下目标的尺寸大小,缺陷的测量精度为mm,经过应用实践,加装的传感器组合方案可半自动地识别cm级的水下检测缺陷,对缺陷的测量精度达mm级,典型测量水下照片见图3、图4。
 | 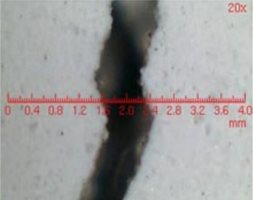 |
| 图3 激光尺度仪测定混凝土裂损尺寸 | 图4 激光尺度仪测混凝土裂缝宽度 |
3.3 水下潜航器运动监控及辅助操控技术
水工隧洞运行过程或带水状态中进行无人潜航器的水下检测作业,无人潜航器的作业安全是作业控制的重中之重。通过引入VR辅助作业系统,不但具有在线辅助ROV作业能力,而且具备方案预演、人员培训等离线辅助决策能力。声视觉传感器的仿真数据是VR辅助作业系统离线模式的重要数据支撑,针对复杂水工隧洞的作业目标,构建作业过程中的水工模型,辅助进行操作。水下潜航器操作员感知作业机器人与作业目标的方位和距离,根据作业工具构建不同类型的干涉检测模型,开展实时碰撞干涉预警,实时为领航员提供作业工具与作业的相对距离、方位、碰撞预警等信息提示。实时为机器人操作员、作业指挥人员提供全方位视角虚拟作业场景。无人潜航器水下实时仿真系统主要为了监视ROV在水下工程作业中的行进位置及运动姿态,以辅助操作者在可视的有限空间里面安全地进行检测作业。水下工程作业监控无人潜航器现场照片及仿真界面见图5、图6。
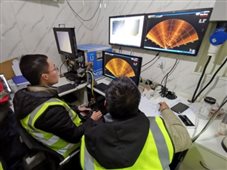 | 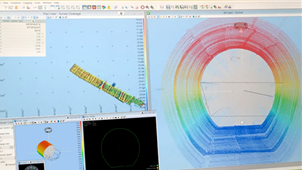 |
| 图5 水下作业监控现场照片 | 图6 水下潜航器运动监控仿真界面 |
4 应用现状及案例
4.1 二滩水电站尾水洞检测
二滩水电站已运行十五年有余,尾调室和尾水隧洞作为电站重要的引水发电建筑物,受设计结构布置和检查通道等客观条件限制,自1998年投运以来尚未进行过全面检查。为全面掌握洞室结构现状,分析评价尾调室和尾水隧洞的运行状态,确保电站运行安全和发电机组安全稳定运行,二滩水电站组织对2#尾水隧洞开展了水下检查。检查内容包括:混凝土内表面有无破损、剥落、露筋、开裂、裂缝、冲蚀等问题,内表面附着物情况,底板磨损情况,结合部位完好性等。对2#尾水隧洞的全洞段进行全覆盖扫描,总长约589.8m。
尾水隧洞水下检查采用无人潜航器系统搭载水下声呐、水下高清摄像设备进行,潜器单元2#尾水隧洞出水口平台吊放。无人潜航器在水中则依靠自身推进器提供的动力,沿计划航线进行水下检查作业。普查阶段,以顺尾水隧洞流道布置检查测线;详查阶段,分别在两个工作平台处采用无人潜航器搭载水下声呐、水下高清摄像设备对2#尾水隧洞发现的各个缺陷以及重点部位逐一进行详查,检查路线紧贴参照目标,沿测线行进。
水下检查过程中,潜器单元的定位主要通过ROV脐带缆长计数器、深度计、水下图像声呐及惯导定位系统,综合实现潜器单元相对水下建筑物准确位置的识别和判定,并通过潜器单元自身搭载的光纤罗经、姿态传感器及避碰声呐等,综合对潜器单元的定位及俯仰姿态等提供辅助参考信息。
通过水下检测发现,工作布置现场照片及典型水下检测缺陷位于Sta.TT0+104.0~Sta.TT0+112.0桩号范围内,在隧洞左边墙,介于结构缝ff13~ff14之间,左边墙上发现三条裂缝,裂缝检测情况为:
裂缝1为运行期新裂缝,缝长约3.2m,最大视缝宽约2.5mm,位于左边墙;
裂缝2为施工期老裂缝,缝面凸起,局部可见钙质析出,缝长约2.6m,位于左拱腰;
裂缝3为施工期老裂缝,缝面凸起,缝长约4.0m,位于左拱腰。
裂缝影像见图7。
  |
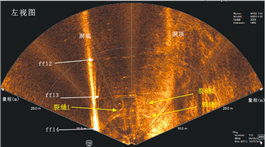 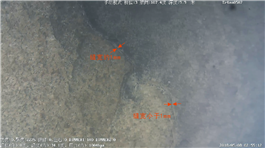 |
图7 工作布置现场照片及水下检测裂缝影像图
4.2 拉西瓦水电站引水隧洞检测
拉西瓦水电站6#机组引水隧洞总长为355.905m,管道内径9.5m,钢筋混凝土衬砌,衬砌厚0.9m/0.5m,下平段采用钢板衬砌,单管长52m,钢衬厚度40mm~57mm。压力管道作为电站重要水工建筑物,受客观条件限制,难以对下平段以上部位流道进行巡视检查,为确保电站运行安全和发电机组安全稳定运行,通过对压力管道进行水下检查,以掌握管道洞壁运行状况及时发现缺陷,为水电站安全运行提供依据。
根据拉西瓦水电站引水隧洞现场工作环境,水下无人潜航器由检修闸门门槽吊放进入引水隧洞待检查区域,因此,水下无人潜航器地面控制单元、设备吊放单元以及供电单元均位于进水塔顶部平台;为水下无人潜航器系统潜器单元提供供电及实施通讯的脐带缆沿检修闸门门槽布放;待水下无人潜航器潜器单元到达引水隧洞上平段以后,潜器单元沿计划航线前进开展水下检查工作。
水下无人潜航器在水下检查过程中,主要使用水下光学高清摄像设备开展检查工作,采用环隧洞内壁截面布置检查测线,布置原则为:沿隧洞内壁圆环截面摄像检查一圈,相邻测线环间距约4m,每条航线只摄像一次,并覆盖两侧一定范围。典型缺陷成果图见图4.3。
 |  |
图8 典型缺陷图-裂缝及表观不平整
5 结论
通过水下潜航器ROV对电站复杂水工隧洞在带水状态进行检测,具有很强的实用性,水下潜器可顺利通过、进入较为狭小的引水隧洞开展检测作业。在此基础上,突破现有开放水下检测装备的瓶颈,从封闭空间水下定位技术、缺陷精细检测技术、水下潜航器运动监控及辅助操控技术等多个关键问题入手,形成了复杂水工隧洞在带水状态水下检测成套关键技术方案。
此项检测技术可一定程度解决目前电站水下检测的技术难点。结合在二滩水电站、拉西瓦水电站水工隧洞环境下检测工程中运用成功,取得了良好的经济和社会效益,该技术在电站水下设施检测工程中的推广应用具有较强的实际意义。
[2]单宇翥,陈洋,水下机器人在三峡水利枢纽导流底孔封堵检修门水下清理工程中的应用.大坝与安全,2015(3):51~53.
[3]郑发顺.遥控水下机器人在我省水利水电工程水下检测中的应用.水利科技,2014(1):40~42,44.
[4]李钟群,孙从炎,蒋晓旺,等.水下机器人在浙江省水库大坝检测中的初步应用.浙江水利科技,2010(3):57~59.
[5]Sherwood B. Advances in Flooded Tunnel Inspections by ROV,2000.
[6]Hosko M A. Inspection of a Hydropower Tunnel Using Remotely Operated Vehicles (ROV)A 5-year Case Study,1995.
[7]胡明罡,左丰收,邢立丽.水下机器人技术在密云水库白河泄空隧洞水下探测中的应用.北京水务,2016(6):59~62.