本文为原创,可在署名“陈思宇 唐力 曾宪强 肖长安”和转自“昆明市水利学会”的前提下转载,否则视为侵权!
关键词:多波束测深系统;水下无人潜器;水利水电工程;联合检测
水下综合成像技术在水利水电工程中的应用研究
陈思宇,唐力,曾宪强,肖长安
(中国电建集团昆明勘测设计研究院有限公司,云南昆明 650051)
摘要:介绍了以多波束测深系统为主的水下三维成像技术的构成、工作原理、作业方法,以及以水下无人潜器为载体的普通成像技术的构成,通过研究两者在水利水电工程中联合进行无损检测,并在某湖泊水底探测以及某水电站消能塘水下检测进行实践,证明以水下综合成像技术为主的联合检测思路可以得到令人满意的探测结果。
关键词:多波束测深系统;水下无人潜器;水利水电工程;联合检测
水下综合成像技术包含了普通成像技术和三维成像技术[1],其中,普通成像技术主要包含了水下摄像探测、水下二维声呐扫描技术;三维成像技术主要包含了多波束探测、水下三维声呐扫描技术以及水下激光扫描技术。针对水利水电工程检测的需要,本文主要介绍以多波束测深系统为主的水下三维成像技术,以水下无人潜器为载体的普通成像技术在水利水电工程无损检测中的应用。
多波束测深系统诞生于20世纪60年代,它是一种实现水底地形全覆盖测绘的大型组合系统,具有精度、高效率的优点,由于科学技术以及经济发展等方面的需求,多波束测深技术于20世纪90年代开始在国内得到应用[2],近年来该技术除了应用在海洋测绘以外,在水利勘测、河道管理、水运工程、清淤智力、灾害监测等多个领域也有广泛地应用。
水下无人潜器,是一种工作于水下的极限作业机器人,能在潜水员不能到达的深度与不安全的环境下进行水下检测和其他水下作业。随着小型化技术的发展,水下无人潜器往往以其体积小、阻力低、机动灵活,搭载方便等优点[3-4],在海洋、水利水电工程结构的水下无损检测中得到了广泛重视与应用。
伴随国家西部大开发战略的进一步实施,水库、水电站正处在建设的高潮,建成后的水利水电在经过一段时间的运行后,会出现不同程度的淤积、材料劣化、功能降低等现象[4]。因此,及时进行检测、技术评估,正确掌握现有水工建筑物的安全性、使用情况以及耐久情况尤其重要。
鉴于多波束测深与水下无人潜器的局限性及观测误差、数据有限等因素,造成了单一方法无法全面了解水下情况,所以开展以多波束测深与水下无人潜器为主的联合水下检测十分必要的。本文以水利水电工程水下无损检测为研究对象,介绍了多波束测深与水下无人潜器联合检测技术,通过面积普查与局部详查组合的方式进行联合检测,综合不同水下成像方法各自的优势,促进查明了水下地形地貌以及水下结构的破损、淤积等情况。
1 系统组成与工作原理
1.1 多波束测深系统
多波束测深系统是以一定的频率发射多个波束,波束具有沿航迹方向开角窄而垂直航迹方向开角宽的特点,多个波束形成扇形声波束探测区。单个发射波束与接收波束的交叉区域称为脚印,发射与接受循环称为声脉冲。根据各个角度的声波到达时间或相位即可测量出每个波束对应点的水深值,若干个测量周期组合就形成了带状水深图(如图1所示),多波束测深系统组成见图2。
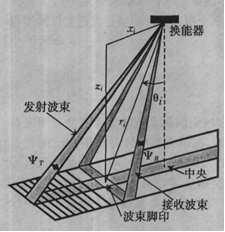
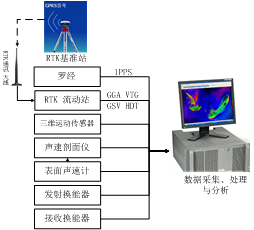
图1 多波束测深系统工作原理示意图 图2 多波束测深系统组成
1.2 水下无人潜器系统
水下无人潜器是一种由水面遥控的水下作业系统。它能在水下三维空间自由航行,可以搭载相关水下探测设备进行水下摄像、水下二维声呐扫描、水下三维声呐扫描,同时,搭载多功能机械手、施工设备可以完成水下简易施工作业。水下无人潜器按遥控方式分为有缆、无缆二种,有缆水下无人潜器(Remote Operated Vehicles, ROV)通过脐带电缆获得动力、传送操作指令和探测数据,它主要由推进动力系统、控制系统、导航系统和潜器单元组成;无缆水下无人潜器(Autonomous Underwater Vehicle, AUV)由水面工作船通过声呐发信器发出遥控指令,对潜器单元的工作进行遥控。在水下无损检测中,有缆无人潜器的应用最为广泛。


图3 水下无人潜器系统组成
2 联合检测技术思路与方法
以多波束测深系统为主的水下三维成像技术,其探测成果是条带状水深图及条带状水下地貌图,该成果可以全面了解探测区水底地形的起伏情况,但无法准确、直观地判读水底情况;以水下无人潜器为主要载体的普通成像技术,其探测成果是水下局部范围的直观成像,无法全面、高效地了解整个探测区的水底环境,同时,复杂的水下检测环境使得水下无人潜器的作业存在高风险,因此,多波束测深系统与水下无人潜器联合探测采用面积普查与局部详查相组合的方式进行探测。具体探测方法如下:
(1)采用多波束探测系统对探测区进行全覆盖扫描,了解探测区水底整体情况,初步判断异常的空间分布情况。整个探测过程包括测前试验、测前准备以及数据采集3个步骤。首先进行测前试验,在测量前对多波束测深系统等设备进行检查、测试和校准;其次为测前准备,启动多波束主机,输入声呐参数、水声速等参数、按照工作方案生成导航测线;最后进行多波束数据采集,根据已有资料估算测量起始点水深值,启动并保持数据采集状态,进行水底地形测量、水底地貌探测、水声速测量以及潮位测量,测量船需要按照计划的航线尽量保持直线航行,做好数据采集情况记录。
(2)以多波束测深成果为基础,使用水下无人潜器对探测区内的各个异常点或者存在疑问的区域逐一进行详查,进一步探查确认水底地形地貌、水下结构的表观破损、裂缝、露筋等情况的空间分布,表面淤积情况及性质。尤其需要注意的是,水下无人潜器在进行水下探测前,需要深入分析多波束测深成果,划分水下作业高危区域,在该区域进行水下检测需要提前做好避险措施。
(3)综合水下三维成像技术以及水下普通成像技术的探测成果,对圈定的异常位置进行分析,最终确定水底地形地貌、水下结构的表观缺陷或淤积层的规模、类型、深度等参数,并进行综合展示,为后期的工作部署及施工处理提供依据。
3 应用实例
3.1 某湖泊应用实例
(1)工程概况
位于云南省昆明市西南,是云南省最大的淡水湖,湖岸线长163.2km,平均水深约5m,面积为306.3km2,容水量为15.7×108m3。该湖泊为地震断层陷落型的湖泊,其外形似一弯新月,呈南北向分布,南北长约39km,东西最宽约13.3km,湖面平均海拔为1886m,东南北三面由盘龙江等20余条河流汇入,湖水由西南面海口流出,经普渡河汇入金沙江。
本次水底地形地貌探测采用了多波束测深系统,分别进行了水底三维地形探测以及水下地貌探查,要求进一步探查水下地形变化情况以及水底地貌特征。
(2)联合探测成果分析
2015年10月,通过使用多波束测深系统对该湖泊水底地形地貌进行探查,成果显示:该湖泊存在一大一小,共计两个“海眼”,见图4,其中,大海眼范围,最大水深为9.87m(高程为1877.46),坐标(24:46:18.680,102:39:58.588);小海眼范围,最大水深为8,45m(高程为1878.88),坐标(24:46:13.902,102:39:56.961)。另外,结合水底地形、水底地貌联合探测,发现大海眼最深处存在若干孔洞(见图5),结合该区域地质情况综合分析,初步认为该孔洞为岩溶所致。
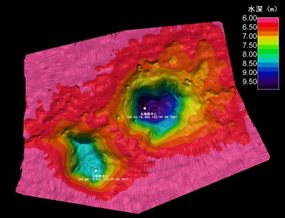
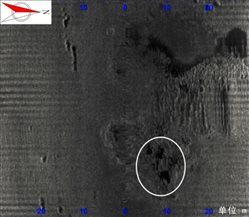
图4 某湖泊海眼水域水底地形图 图5 某湖泊大海眼水域水底地貌图
3.2 某水电站应用实例
(1)工程概况
位于云南省的某水电站枢纽工程,大坝为双曲拱坝,全长472.00m,坝顶高程875.00m,最大坝高115.00m,泄水坝段下游采用消能塘消能,消能塘长148.00m,底宽37.20m,消能塘尾部二道坝顶高程779.00m。二道坝下游设20m长护坦。电站装机容量240MW,总库容12.17×108m3,水库正常蓄水位872m。工程规模为大(1)型,工程等别为Ⅰ等。
本次检测采用多波束测深系统以及水下无人潜器进行组合探测,要求检查消能塘底部的冲刷、破损情况;消能塘护坦与上游连接段、左右贴边坡边墙、尾坎迎水坡和防冲板等区域的冲刷、破损情况。
(2)联合探测成果分析
通过对云南某水电站消能塘进行多波束测深与水无人潜器联合探测,成果显示:消能塘护坦、左右贴坡边墙、尾坎和防冲板整体上没有开裂和压裂现象,左右贴坡边墙间接缝、护坦和左右贴坡边墙坡脚间接缝良好,消能塘结构总体完好。另外,在消能塘范围内共存在两处规模较大的异常区(图6),编号为①~②。
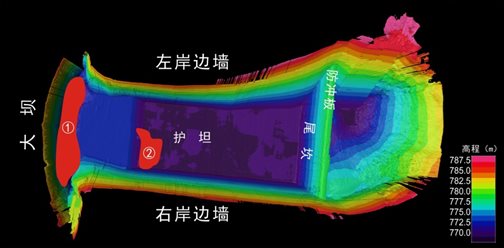
图6 云南某水电站消能塘异常范围分布示意图
①号异常位于护坦(设计高程:772.5m)与混凝土拱坝连接部位,在多波束实测断面较设计断面出现了明显的下凹(图7),凹陷范围约为(长×宽×深)55m×6m×4.5m,经过水下无人潜器详查,可以观察到①号异常在护坦一侧的上平整,形状规则,呈矩形,两种方法的探测成果基本一致,经复核,该凹陷异常疑似施工阶段的塔吊基础。同时,由水下无人潜器探测记录(图8)可以看出,①号异常坑内堆积了大量的以钢管、钢筋、废木料为主的建筑材料,同样也堆积了厚层的以块石、碎石、沙土为主的土石层。
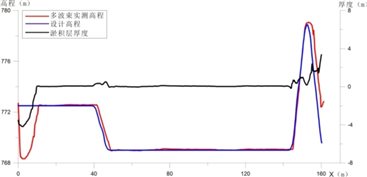
图7 云南某水电站消能塘典型断面图
|
|
|
|
|
|




图8 ①号异常水下无人潜器探查典型成果
4 结论
立足于解决水利水电工程中水下无损检测问题,采用以多波束测深为主的水下三维成像技术及水下无人潜器为主要载体的水下普通成像技术,以面积性普查与局部详查相组合的方式进行联合探测。通过工程实例验证,说明了联合检测技术在水利水电工程水下无损检测中中具有必要性和良好效果。
参考文献:
李天恩. 水下成像技术在水利工程中的实际应用[J]. 水电施工技术, 2013(4):75-77.
王建忠, 王玉龙. 多波束与 RTK 三维水深测量技术的联合应用[J]. 测绘工程, 2014, 23(4): 65-68.
徐玉如, 庞永杰, 甘永, 等. 智能水下机器人技术展望[J]. 智能系统学报, 2006, 1(1): 9-16.
关宇, 汪良生. ROV 检测技术[J]. 船舶工业技术经济信息, 2002 (2): 22-25.
王胜年, 潘德强. 港口水工建筑物检测评估与耐久性寿命预测技术[J]. 水运工程, 2011 (1): 116-123.
作者:陈思宇
电子邮箱:gp_chensiyu@163.com
手机号码:18987678122
QQ:413654220